Chaîne de puissance
Le système d'asservissement qui équipe chacune des roues est destiné à contrôler la vitesse de rotation de la roue, et doit permettre au système embarqué de détecter un glissement (manque d'adhérence) ou un patinage de celle-ci (comme par exemple quand la situation du robot fait que momentanément la roue ne touche plus le sol...).
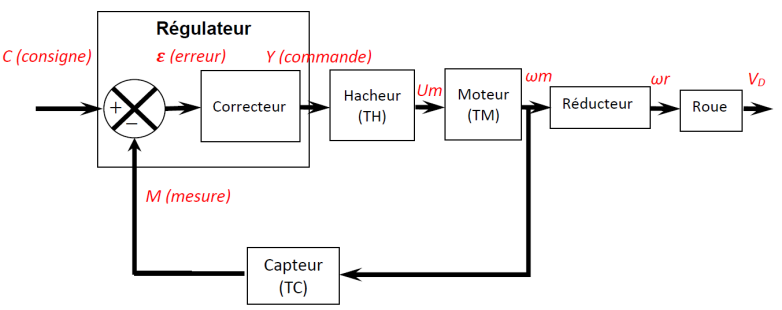
Le réducteur placé en sortie du moteur présente un rapport de réduction ![]()
Calculer ωm.
Calculer la fonction de transfert[1] (transmittance) TM du moteur sachant que Um=10V.
Calculer la fonction de transfert TH du hacheur sachant que la commande Y=5V.