1 Définitions
Hypothèse de solide indéformable
Lors de l'utilisation d'un mécanisme, les solides qui le constituent se déforment sous l'action des efforts qu'ils subissent. Dans la suite, on fera l'hypothèse que ces déformations sont suffisamment petites pour que l'on puisse les négliger et on considérera les solides comme étant indéformables.
Une pièce mécanique (S) peut être considérée comme un solide indéformable si quels que soient les points A et B appartenant à (S) la distance AB reste constante au cours du temps. \(\left\| \overrightarrow{AB}\right\|=constante\).
Définition : Référentiel:
Un référentiel est constitué d'un repère de référence \(\mathfrak{R}=(O,\vec{x},\vec{y},\vec{z})\), associé à un solide de référence, couplé à une échelle de temps
Repérage de solides
Un repère, noté \(\mathfrak{R}=(O,\vec{x},\vec{y},\vec{z})\), est constitué :
d'une origine, le point O dans l'exemple, en général un point particulier du solide ;
d'une base orthonormée directe, \(B=(\vec{x},\vec{y},\vec{z})\).
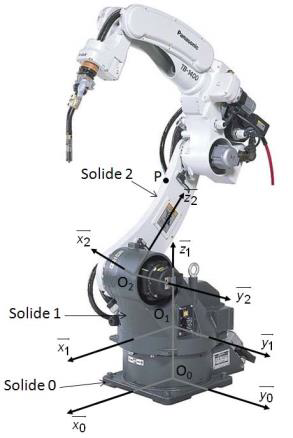
On associe à chaque solide un repère.
Au solide 0 sera associé le repère \((O_0,\vec{x_0},\vec{y_0},\vec{z_0})\), au solide 1 le repère \((O_1,\vec{x_1},\vec{y_1},\vec{z_1})\), etc ...
Dans un repère associé à un solide, chaque point matériel du solide, est supposé fixe.
Repérer ou positionner, un solide 1 par rapport à un solide 2 revient ainsi à positionner le repère associé au solide 1 par rapport au repère associé au solide 2.
Repère de temps
Il y a nécessité d'introduire le temps comme repère pour définir les grandeurs cinématiques (vitesse, accélération,...).
L'unité de temps est la seconde (s).
La variable de temps est t : l'instant.
Il faut veiller à ne pas confondre instant ou date et durée.
La grandeur \(\Delta t =t_2-t_1\) est appelée durée entre les deux instants \(t_1\) et \(t_2\) .
