5 Validation de la course du vérin
Rappel de la problématique
On donne une maquette numérique simplifiée pour mettre en œuvre le mécanisme d'inclinaison.
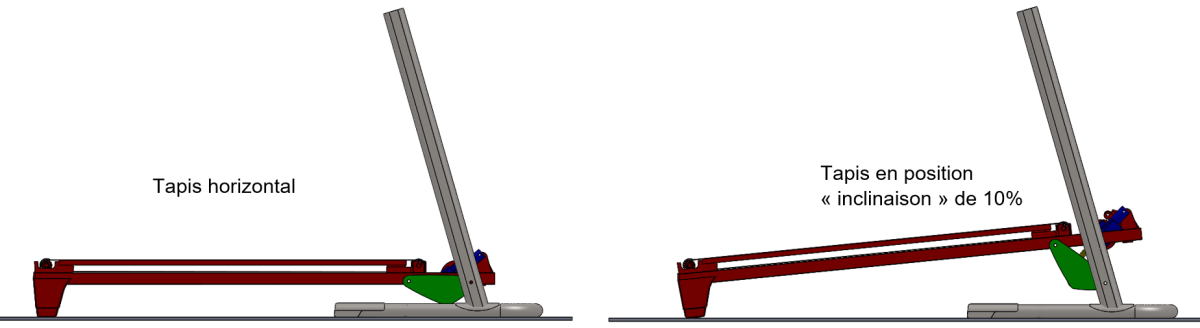
Ci-contre, on peut voir le tapis dans les deux positions extrêmes.
On souhaite savoir si la course du vérin permet de satisfaire l'exigence d'inclinaison du tapis de course.
Q3. Relever l'exigence quant à l'inclinaison du tapis de course. En déduire l'angle d'inclinaison maximal souhaité ainsi que l'incrément.
Complément : Pente en pourcentage
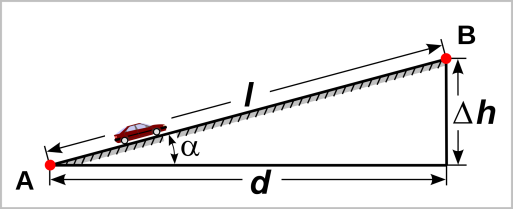
Schéma en coupe longitudinale d'un tronçon routier rectiligne :
p = pente en pourcentage
p = 100 x Δh / d
d = distance horizontale
Δh = différence de hauteurs, d'altitudes = dénivelé
α= inclinaison, angle d'élévation
donc tanα = Δh/d
l = longueur suivant la pente.
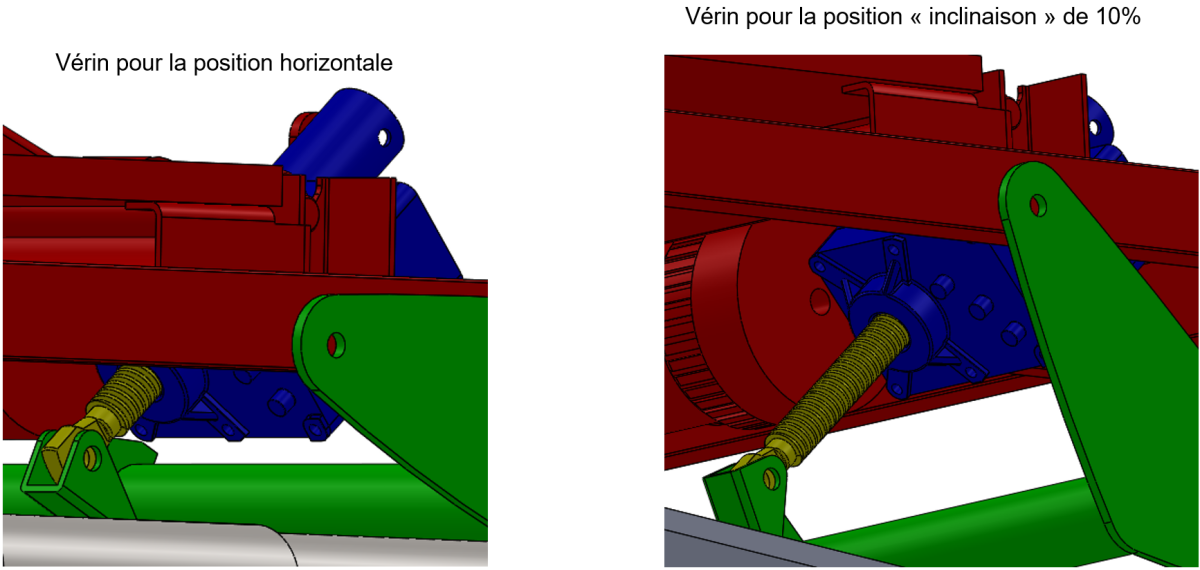
Méthode : Détermination expérimentale de la course du vérin
Ci-contre, on peut voir le tapis dans les deux positions extrêmes.
Vous remarquez qu'entre les deux positions la tige du vérin s'est déplacée.
Brancher le cordon secteur du tapis.
Sur le pupitre, appuyer sur incline pour vérifier que le tapis est bien en position horizontale.
Mesurer la position de la tige du vérin.
Sur le pupitre, appuyer sur incline pour positionner le tapis en position haute.( affichage 10%)
Mesurer la position de la tige du vérin.
Q4. En déduire la course du vérin XX (valeur entière approchée) en mm.

Avec le logiciel SolidWorks, ouvrir le fichier de type assemblage "Tapis TC290 Meca3D".
Ce fichier contient le mécanisme complet. Activer le complément Méca3D
Cliquer droit sur "Analyse" et sélectionner "Calcul mécanique".
Une fenêtre s'affiche donnant des informations sur le mécanisme (nombre de cycles, hyperstatisme, nombre d'équations...).
Cliquer sur "Continuer".
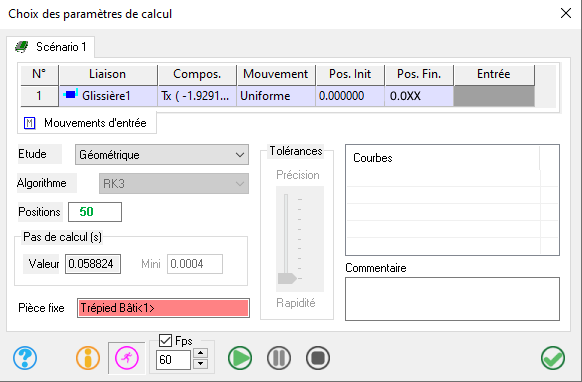
Pour vérifier le bon fonctionnement dans un premier temps, faire une étude géométrique, pour 50 positions, avec la translation TX de la liaison glissière comme mouvement d'entrée pour la valeur de la course calculée précédemment "XX" mm.
Détermination de l'inclinaison par simulation
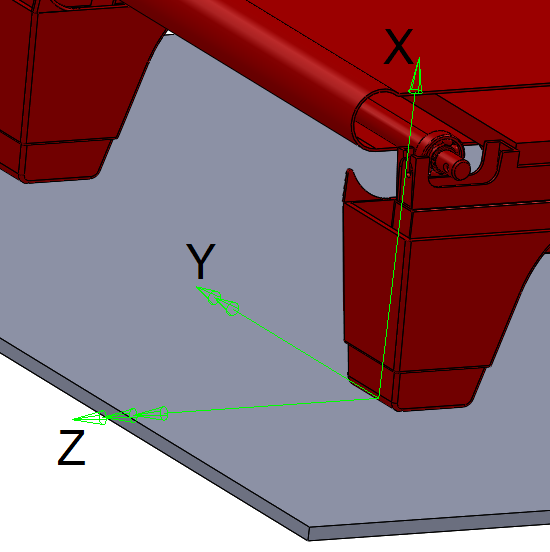
On donne le repère local lié à la liaison linéaire rectiligne pour le logiciel.
Il faut maintenant récupérer les résultats pour visualiser qu'une course du vérin de XX mm permet bien de satisfaire l'exigence d'inclinaison.
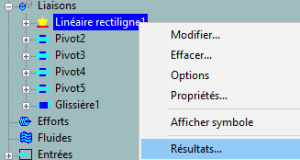
Visualiser les valeurs de la position en rotation pour la liaison "Linéaire rectiligne1" (Cf. ci-contre).
Q5. Expliquer le choix de la courbe à étudier (sur l'axe x, y ou z)
Q6. Vérifier si l'exigence d'inclinaison du tapis est satisfaite.
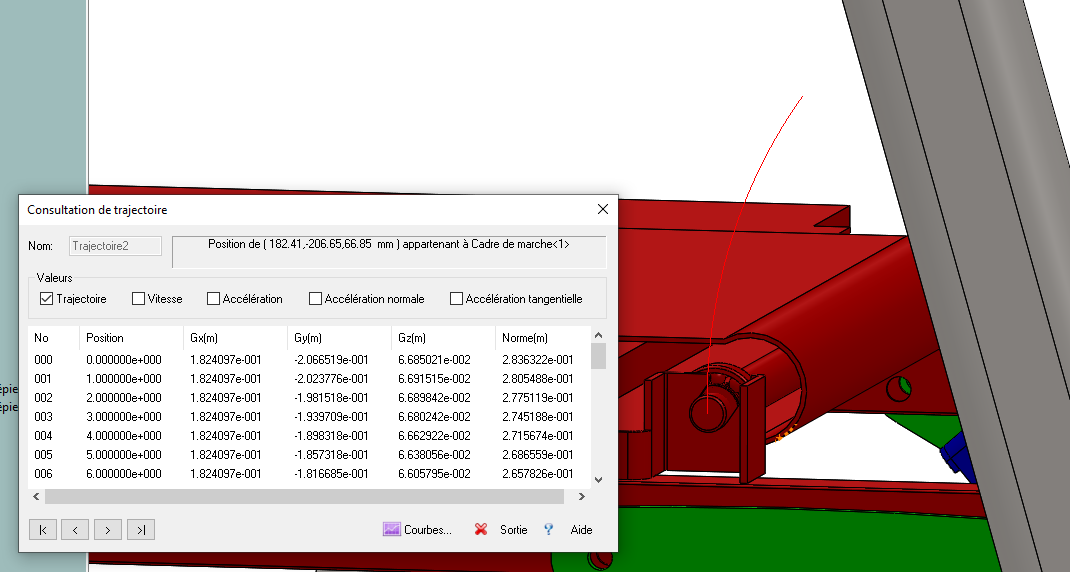
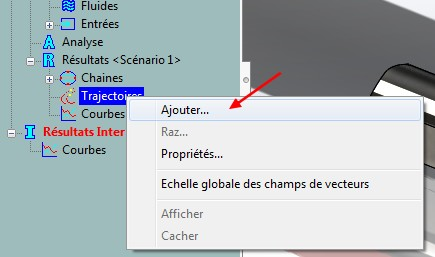
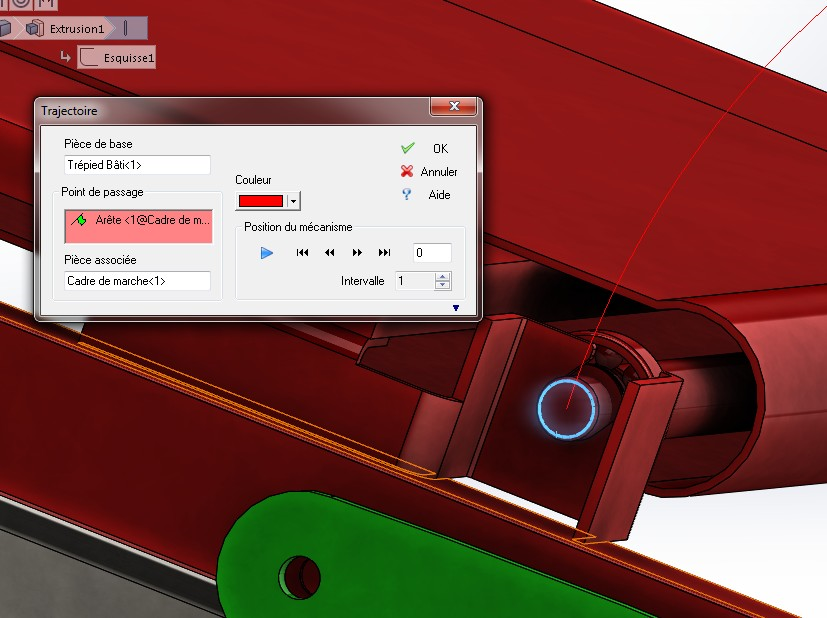
Dans les résultats, Faire un clic droit sur Trajectoire , puis cliquer sur ajouter.
Cliquer sur le cercle permet de définir le point décrivant la trajectoire ci-contre.
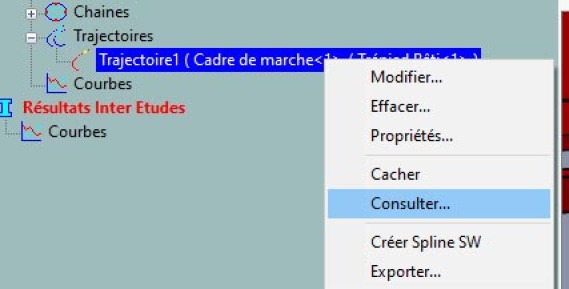
Dans la trajectoire obtenue, cliquer sur Consulter pour visualiser les résultats.
Q7. Exploiter les résultats pour trouver l'élévation du point P ci-contre entre les positions basse et haute. Détailler le raisonnement.Vérifier ce résultat sur le système réel.