3 Architecture du système
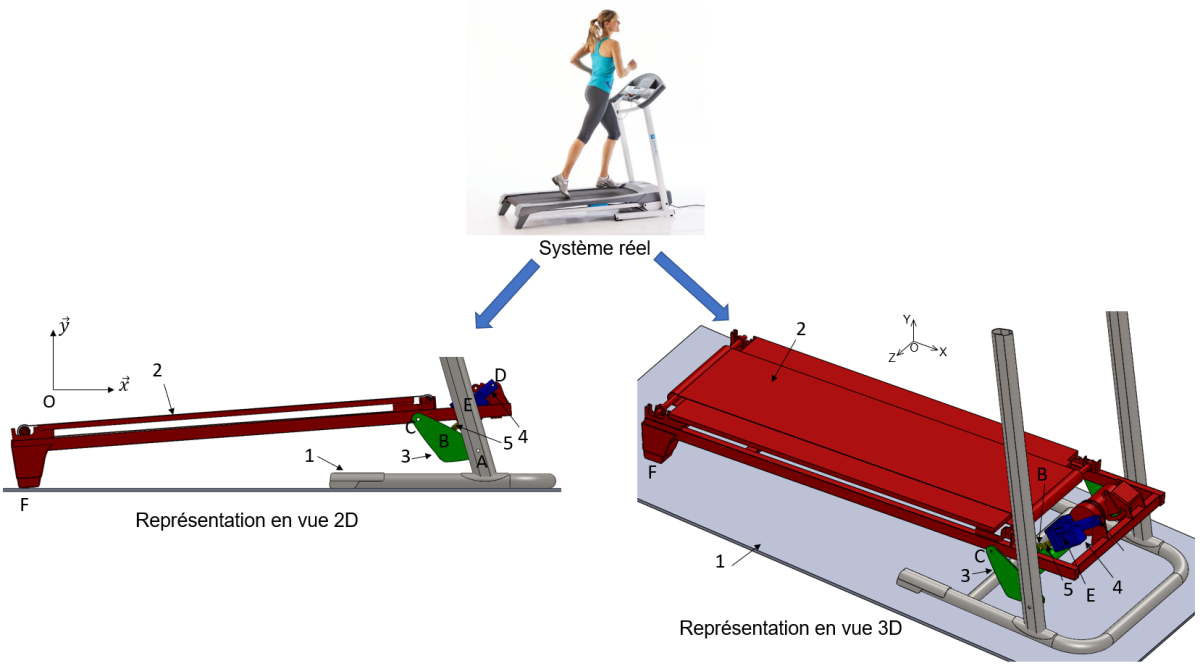
Modélisation du système d'inclinaison du tapis de course
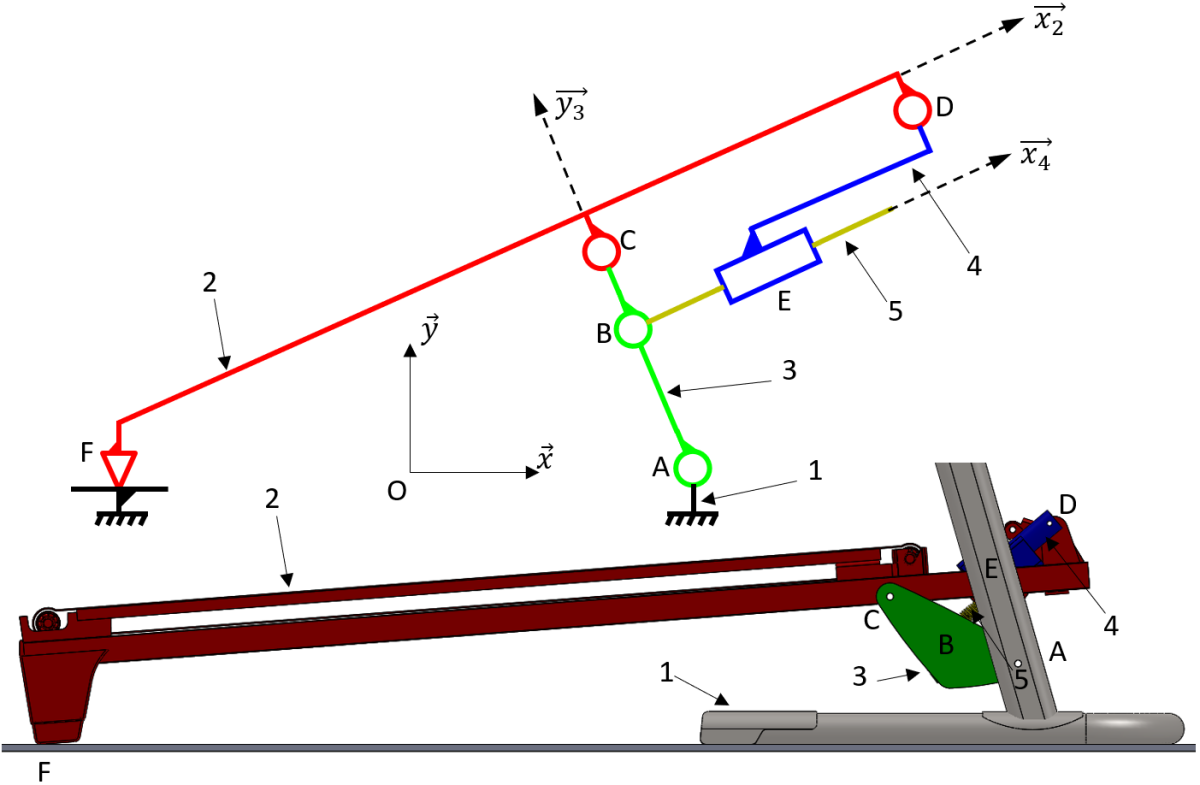
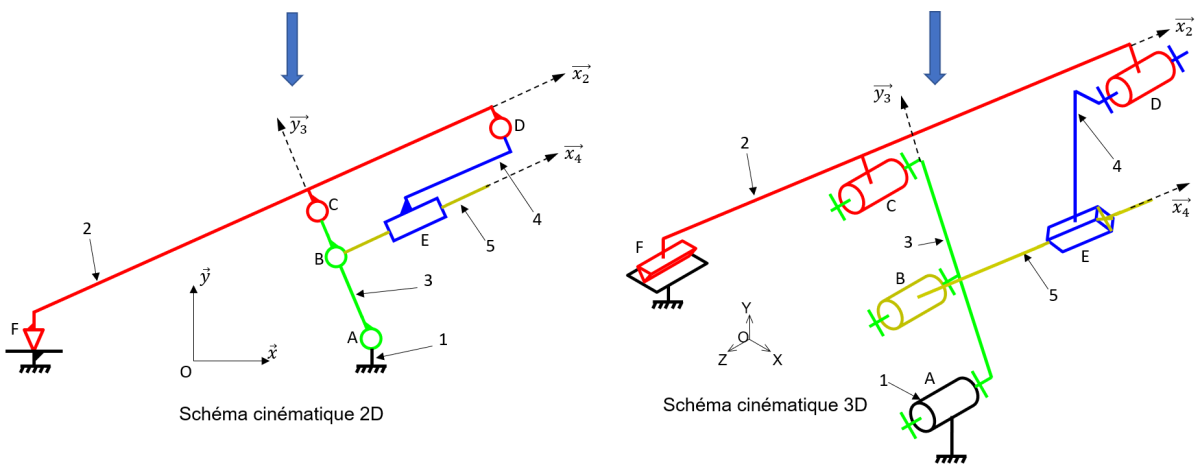
Il s'agit des schémas cinématiques de la chaîne de puissance de l'inclinaison du tapis. La solution présentée est simplifiée car elle ne fait apparaître qu'une liaison glissière (pour représenter le vérin électrique) et ne montre pas le mécanisme complet (réducteur + vis-écrou) qui permet d'obtenir le déplacement de la tige (solide repéré 5).
On donne une maquette numérique simplifiée pour mettre en œuvre le mécanisme d'inclinaison.
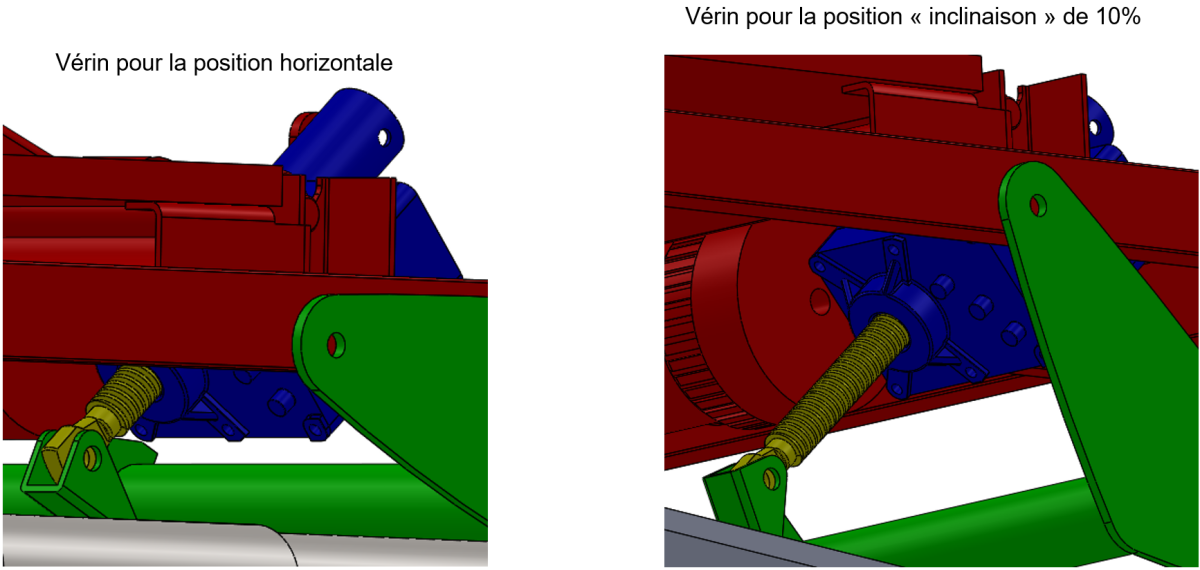
Ci-contre, on peut voir le tapis dans les deux positions extrêmes.
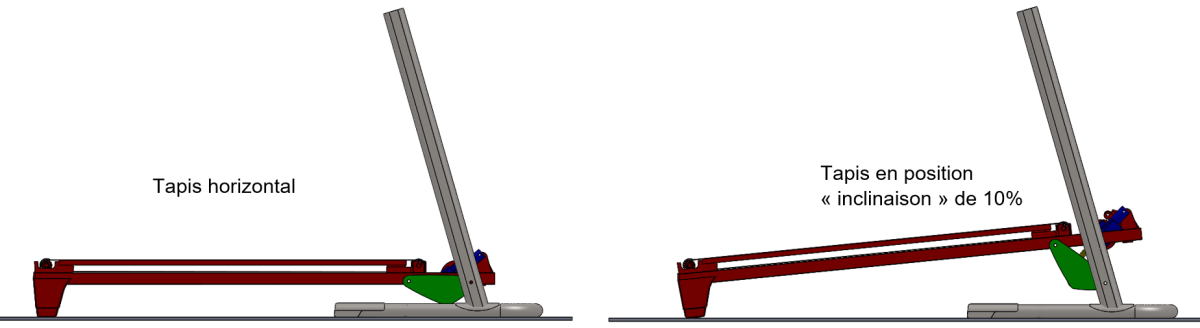
Vous remarquez qu'entre les deux positions la tige du vérin s'est déplacée.