3 Étude des liaisons
Modélisation du stepper
Téléverser le dossier zippé dans u dossier sur le bureau et en extraire tout le contenu (cliquer droit sur le dossier et opter pour Extraire tout...). En fin de séance, effacer les DEUX dossiers (dossier zippé et dossier ordinaire).
Démarrer le logiciel SolidWorks.
Vérifier que Meca3D est bien activé (dans Outils Compléments).
Ouvrir le fichier de type assemblage "STEPPER Meca3D".
Vérifier la présence de l'onglet Meca3D
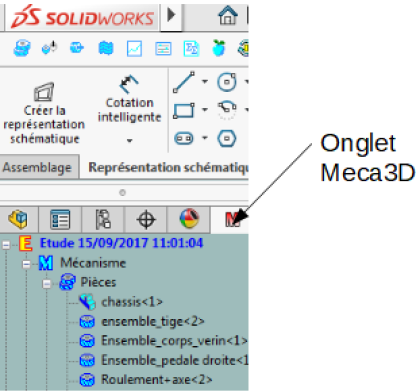
Ouvrir le fichier de type assemblage "stepper meca3D".
Ce fichier contient le mécanisme complet.
Cliquer droit sur "Analyse" et sélectionner "Calcul mécanique".
Une fenêtre s'affiche donnant des informations sur le mécanisme (nombre de cycles, hyperstatisme, nombre d'équations...).
Cliquer sur "Continuer".
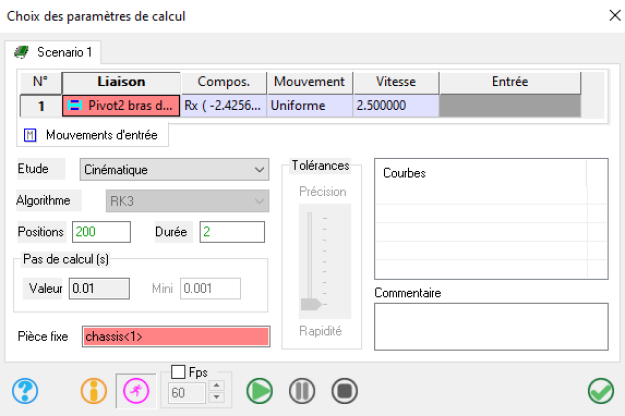
Pour vérifier le bon fonctionnement dans un premier temps, faire une étude cinématique, pour 200 positions pour 2 secondes, avec la rotation RX de la liaison pivot 2 bras droit comme mouvement d'entrée avec une vitesse de 2.5tour/min.
Lancer une simulation pour vérifier le bon fonctionnent.
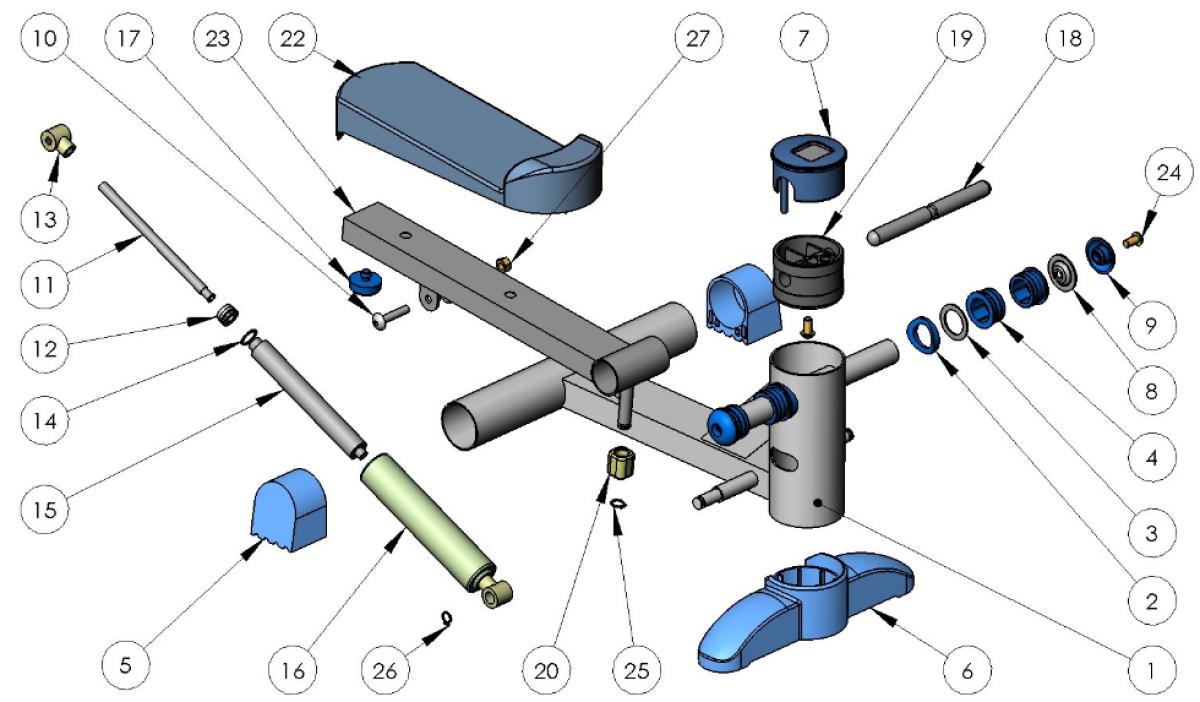
Classes d'équivalence
Q1 : compléter les classes d'équivalence avec les repères de pièces suivants : 5, 6, 9 et 23.
(SE1) : ( 1, 5
(SE16) : ‘(16,
(SE11) : (11,
(SE22) : ( 22,
(SE 18) : (18
(SE 20) : (20
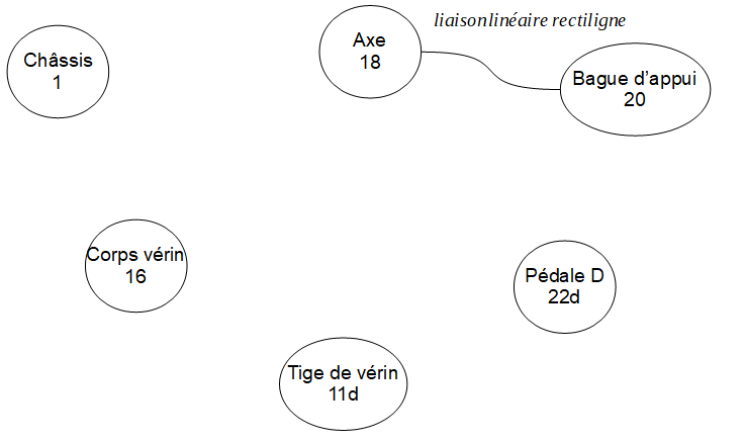
Liaisons
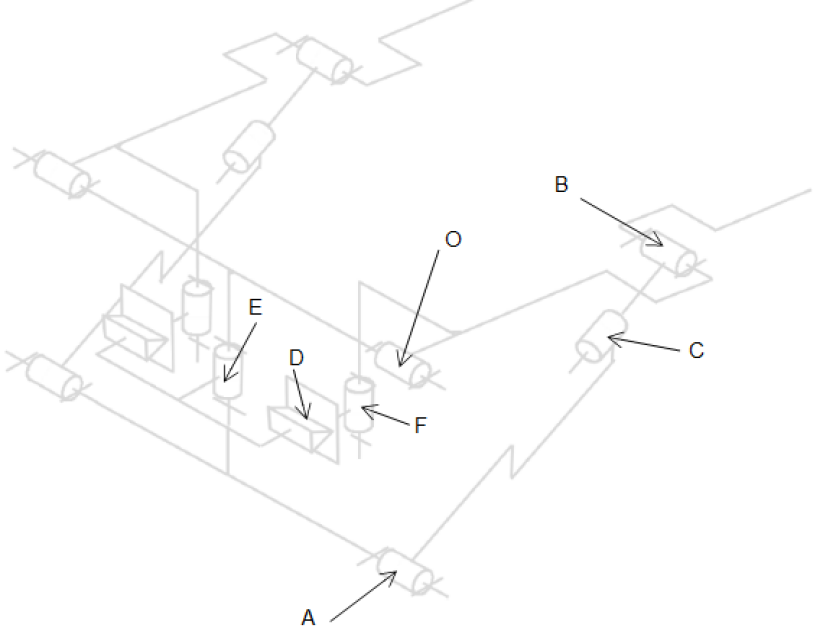
Q2 : En respectant le code de couleur fourni, repasser les classes d'équivalence sur le schéma cinématique fourni. Compléter le graphe des liaisons et ajouter la nature des liaisons ainsi que le symbole du bâti ![]() .
.
(SE1) : noir :
‘(SE16) : rouge
(SE11) : vert
(SE22) : bleu
(SE18) : vert
(SE 20) : rouge
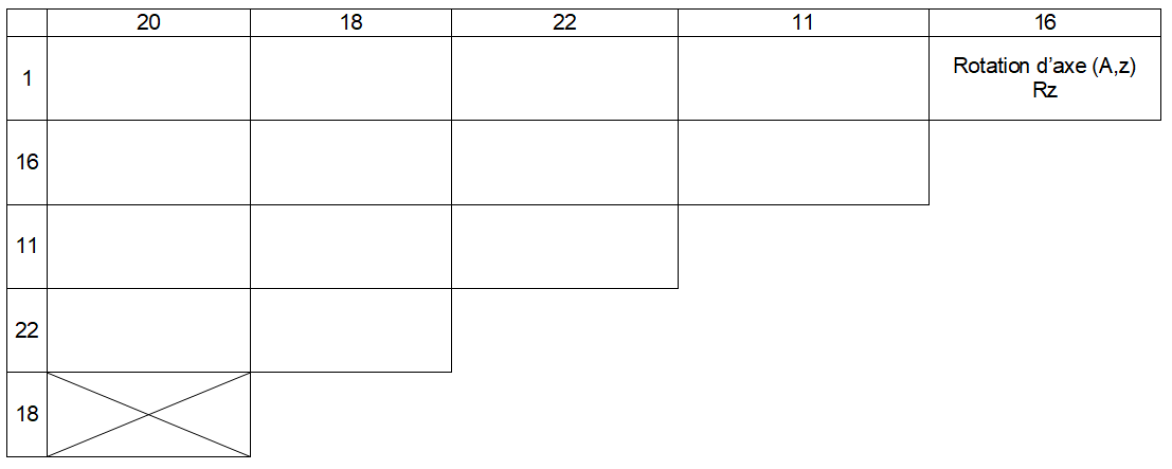
Étude des mouvements
Q3. Compléter (quand la liaison existe) le tableau suivant en donnant la nature des mouvements possibles d'une classe d'équivalence du stepper par rapport à une autre ainsi que le degré de liberté.