Exercice : Analyse du vérin électrique
Étude de la loi d'entrée
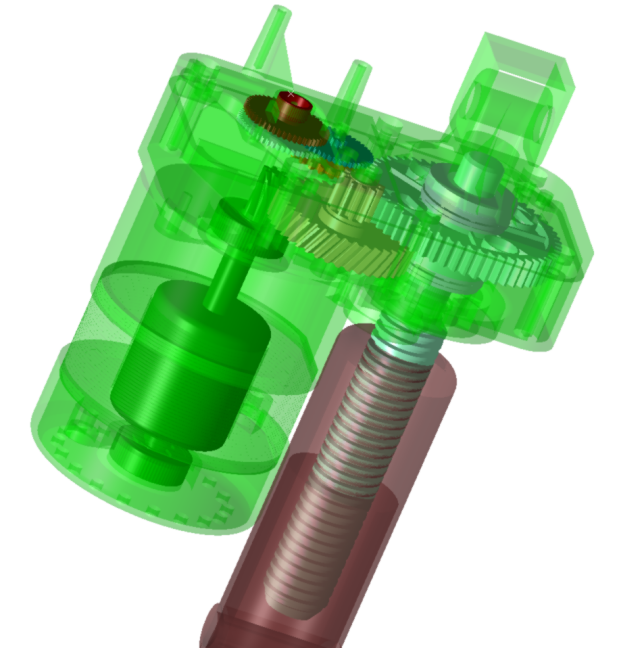
L'étude qui suit porte essentiellement sur le boîtier de transmission entre le moteur et la vis.
Vous avez à votre disposition :
Un boîtier démontable.
La maquette numérique du tapis.
Un tapis de course en état de fonctionnement.
La construction du mécanisme étant réalisée, il vous est demandé de configurer le mécanisme. vous devrez définir la loi d'entrée du mécanisme et paramétrer les différents engrenages ainsi que la liaison hélicoïdale, afin de pouvoir exploiter la simulation.
La loi d'entrée d'un mécanisme correspond à la caractérisation de l'énergie mécanique en entrée du mécanisme :
Question
Q5/ RETROUVER sur sa plaque signalétique, les caractéristiques de l'énergie de sortie du moteur.
Question
Q6/ DÉFINIR la loi d'entrée du système. MODIFIER la loi existante dans CATIA pour l'adapter au système.
Dans DMUKinématics, la lois d'entrée est appelée ''loi de commande'' pour un mouvement de rotation elle s'écrit sous la forme suivantes : Tapis\KINTime /60s*4500turn
Dans laquelle :
Tapis : est le nom du mécanisme auquel s'applique la loi.
KINTime : est le paramètre interne à DMUKinématics correspondant à la loi d'entrée.
60s*4500turn : est la définition du mouvement d'entré, ici c'est un mouvement de rotation qui à pour fréquence 4500tr/mn.
Indice
La loi d'entrée d'un système est en générale une fonction mathématique qui donne la valeur d'une grandeur physique en fonction du temps.
Pour nous cette loi sera sous la forme d'une distance divisée par une unité de temps
Étude de la chaîne de puissance
Vous allez paramétrer les différents constituants de la chaîne de puissance, en vous aidant du réducteur démonté.
Question
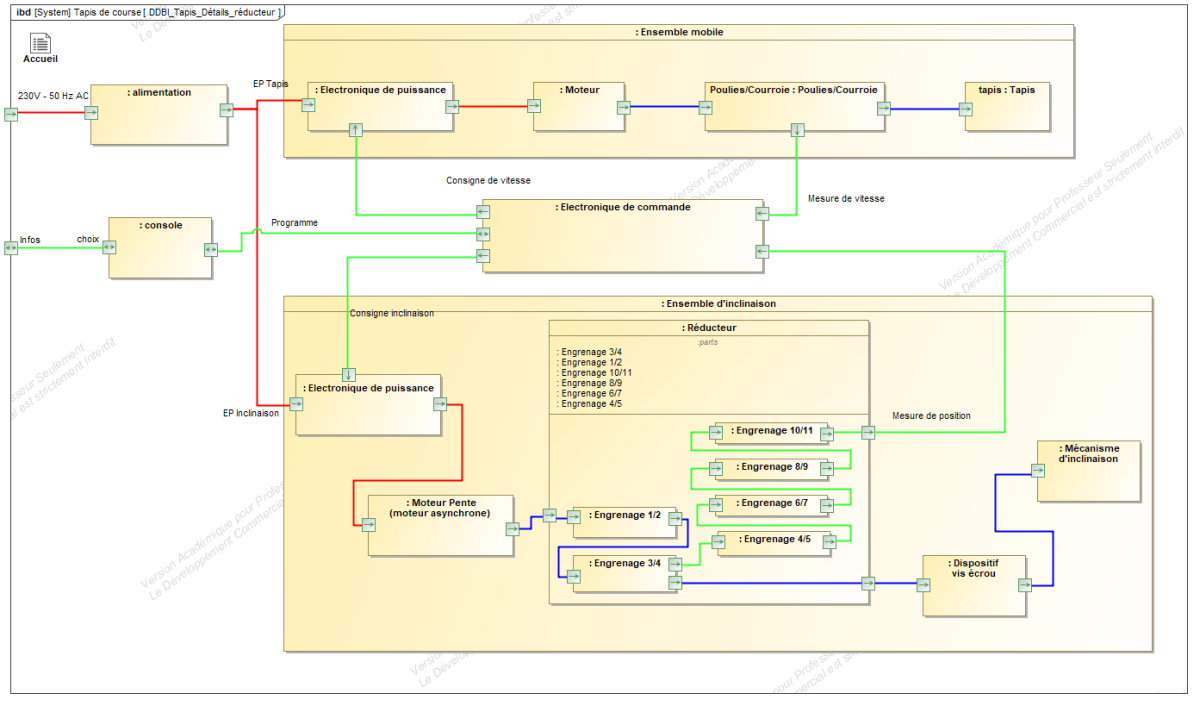
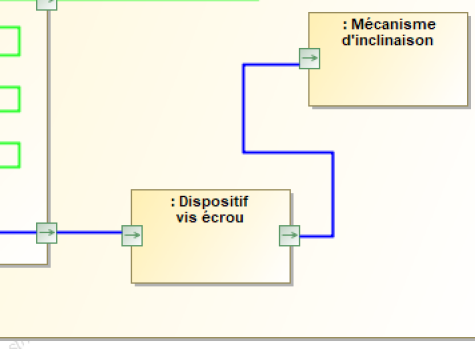
Q7/ COMPLÉTER le diagramme de blocs interne en indiquant les caractéristiques de chaque roue dentée composant le réducteur.
Indice
Pour un engrenage indiquer le nombre de dents de chaque roue
Question
Q8/ DÉTERMINER la valeur du pas de la vis
Indice
le pas d'une vis correspond à la distance entre deux points consécutifs sur un filet,
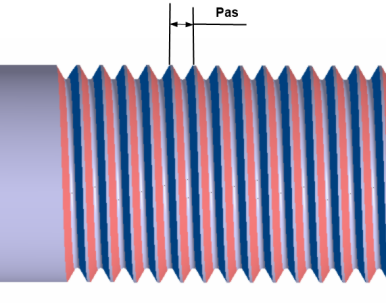
C'est également le déplacement de l'écrou pour une rotation de 1 tour de vis.
Indice
Pour une mesure plus précise, faire par exemple 10 tours de vis et diviser la valeur du déplacement mesuré par 10 pour avoir la valeur du pas.
Question
Q9/ COMPLÉTER le diagramme de blocs interne en indiquant les caractéristiques du système Vis/Écrou.
Paramétrage des lois de sortie
L'objectif de la simulation est d'obtenir entre autre des courbes et des valeurs caractérisants les variables de sorties. Avant de lancer la simulation il faut donc définir les points du mécanisme que nous désirons étudiés.
Consulter le paragraphe "Cinématique" de la Fiche de connaissances « 233_Comportement mécanique des systèmes »
.
L'étude portera sur :
La pente du tapis déterminée à partir du point C,
Le mouvement de l'écrou par rapport au boîtier du vérin électrique à partir du point F.
La rotation de la vis.
La rotation de la roue dentée 11.
Question
Q10/ CALCULER les rapports de transmission :
RV entre le rotor du moteur et la vis,
RC1 entre la vis et l'engrenage 11 sur lequel est positionné le capteur de position
RC2 entre le rotor du moteur et l'engrenage 11.
Question
Q11/ CALCULER les vitesses angulaires ωv et ω11 que doivent avoir la vis et l'engrenage 11 si le moteur tourne à sa vitesse nominale.