Introduction
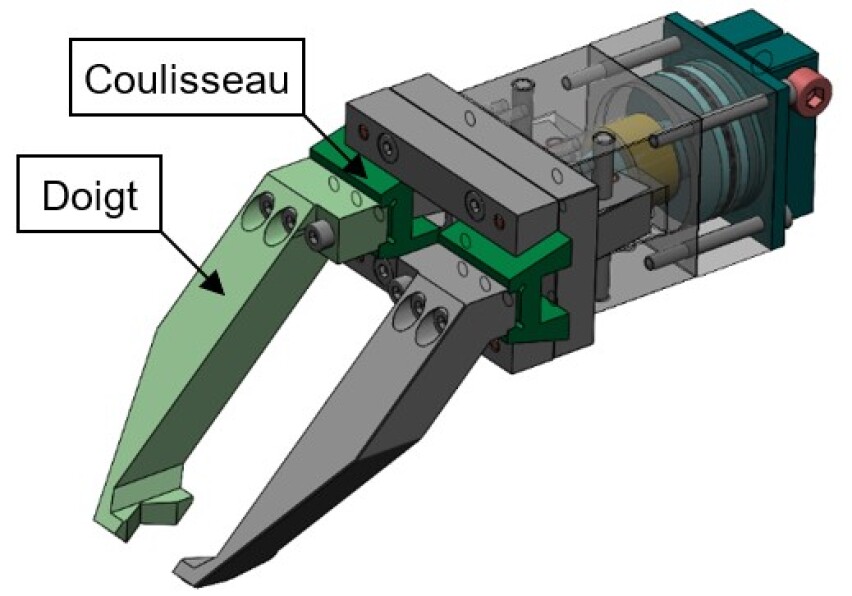
On étudiera le doigt droit de la pince de robot ci-contre.
Le doigt est en liaison complète sur le coulisseau.
Le doigt est réalisé en acier allié.

La mise en position est réalisée par deux appuis plans sur les surfaces repérées Sp1 et Sp2.
Le maintien en position est réalisé par deux vis.
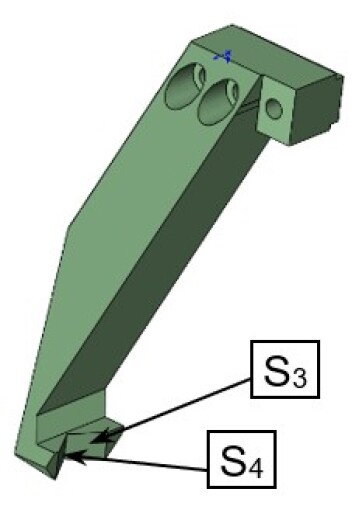
Un effort Fs=200 N est appliqué perpendiculairement sur chacune des surfaces repérées S3 et S4.