Présentation du "modèle de commande "
Télécharger , puis ouvrir le fichier Matlab ci dessous.
Prendre connaissance des informations suivantes.

Fondamental : Réglage de la consigne
La consigne de déplacement est réglée à l'aide du potentiomètre.
Positionner le curseur du coté Min.
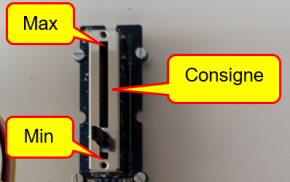
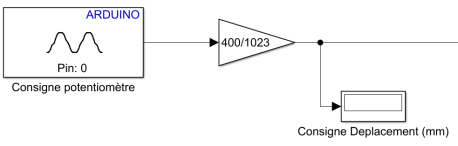
Le bloc Arduino, permet de faire l'acquisition de la grandeur électrique image de la consigne, mais il réalise également une Conversion Analogique Numérique avec une résolution de 10 bits.
Compte tenu des informations précédentes et du schéma ci-contre, déterminer la valeur maximale de la consigne de déplacement.
Fondamental : Réglage de la vitesse
Explorer le chart de commande et déterminer la relation entre la vitesse Vit et le Gain.
Déterminer la valeur de Vit pour une erreur nulle, et pour une erreur de 100 mm. Justifier la présence du bloc
 .
.Justifier la présence d'une constante dans les expressions Vit=(Gain+65) et Vit=(Gain+13). Rappels.