2 Architecture
Définition : Système asservi
Un système automatisé est dit asservi, ou bouclé, s'il est capable de modifier sa commande d'entrée pour maintenir l'état de sa sortie à une valeur choisie appelée consigne.
On parle alors de boucle de rétroaction de la sortie sur l'entrée.
Le système peut fonctionner en boucle « ouverte » si on ne tient pas compte de l'écart ou bien en boucle « fermée » ce qui lui permet de résister aux effets des perturbations extérieures.
Complément : Asservissement et régulation
Ces deux termes ont des définitions très proches.
On utilise le terme "régulation" lorsque la consigne est constante. C'est par exemple la consigne de température dans une habitation.
On utilise le terme "asservissement" lorsque la consigne est variable. C'est par exemple le cas d'un voilier qui remonte au vent et qui doit donc régulièrement effectuer des virements de bord. La consigne change à chaque virement de bord.
Fondamental : Représentation d'un asservissement
Un système asservi peut être représenté par le schéma bloc générique suivant :
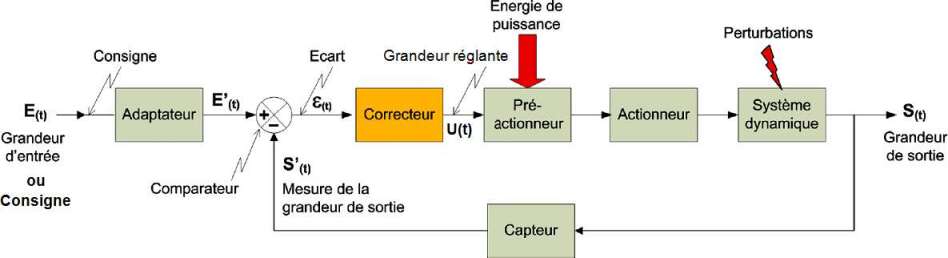
L'adaptateur :
Il met la consigne sous une forme électrique qui puisse être comparée à la mesure de la sortie.
Le comparateur :
Il permet de comparer la mesure de la sortie S'(t) à la consigne adaptée E'(t) en générant une valeur ε(t) appelée écart :
ε(t) = E'(t) - S'(t).
Cette valeur pourra ensuite être "corrigée" pour commander l'actionneur.
Le correcteur :
c'est l'élément qui conditionne les performances de l'asservissement. On retient classiquement trois types de correction, chacun étant réglable par un coefficient spécifique.
Complément : Les différents types de corrections
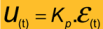
Correcteur proportionnel P :
Il amplifie le signal de commande u(t) (grandeur réglante) en multipliant la valeur de l'écart par une constante Kp. Ce correcteur augmente donc la rapidité mais peut créer de l'instabilité.
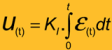
Correcteur intégral I :
Il somme les écarts constatés précédemment ; son action n'est donc pas instantanée. Ce correcteur augmente donc la précision mais peut créer de l'instabilité.
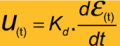
Correcteur dérivé D :
Il agit en fonction de la vitesse à laquelle l'écart varie. Si l'écart évolue vite, sa dérivée est grande et la correction qui en découle importante.
Chacun des correcteurs agit donc spécifiquement sur les performances de l'asservissement.
Dans la pratique, en fonction des performances souhaitées, on utilise généralement un correcteur de type P ou une combinaison de type PI, PD ou PID dans laquelle les différents types sont montés en parallèle.
Certains systèmes asservis peuvent même comporter plusieurs boucles imbriquées (une boucle de courant imbriquée dans la boucle de position par exemple).
Définition : Transmittance
La transmittance H(p) du système en boucle fermée correspond à la relation entre la sortie S(p) et l'entrée E(p) du système.