2 Travail à effectuer
Performances cinématiques
Q1 : À l'aide du diagramme des exigences, relever les critères chiffrés de déplacement à respecter pour la circulation dans un établissement scolaire.
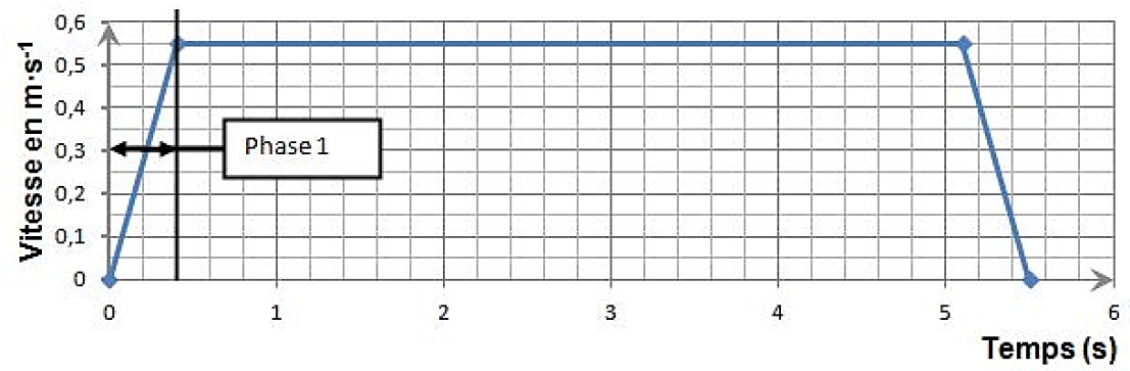
Q2 : À partir du graphe des vitesses, indiquer la nature du mouvement pour la phase 1. Déterminer l'accélération aG du robot lors de cette phase de démarrage.
Étude dynamique
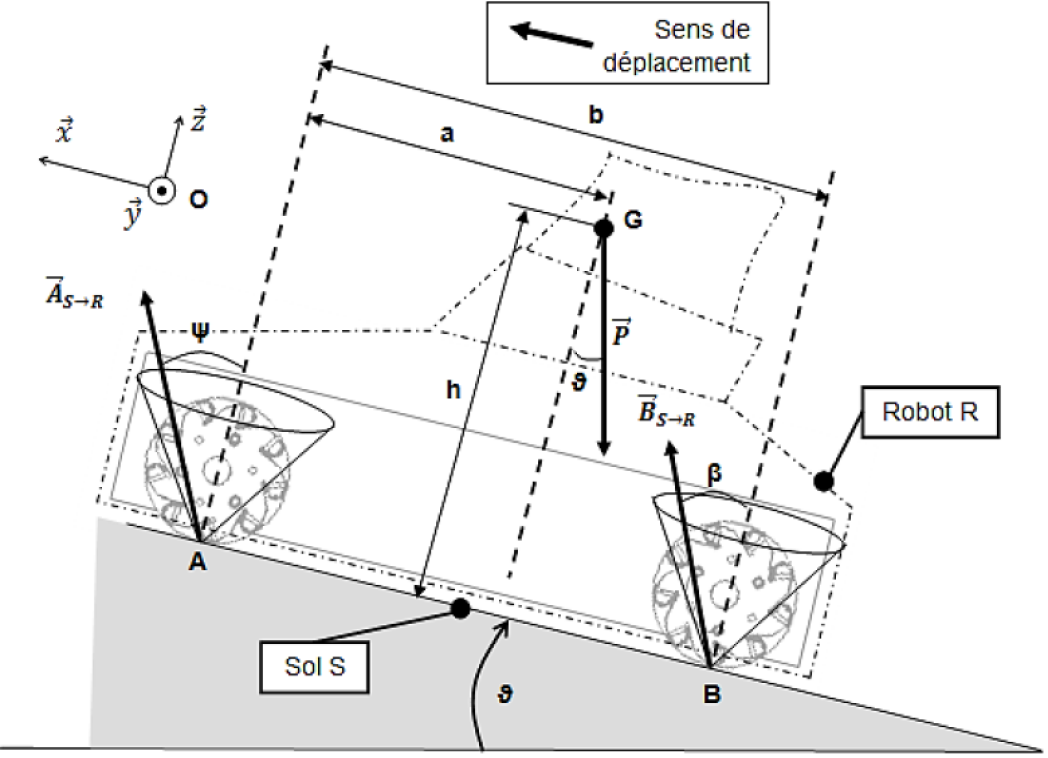
La figure ci-contre correspond à la modélisation plane de l'étude du déplacement du robot.
Hypothèses :
- l'étude est effectuée avec l'hypothèse du roulement sans glissement ;
- le modèle proposé pour le robot présente une symétrie de géométrie et d'efforts suivant le plan (𝑂,𝑥⃗,𝑧⃗) ;
- masse robot, Mr=12 kg ;
- accélération de la pesanteur, g = 9,81 m·s-2 ;
- accélération du robot, aG=1,375 m·s-2 ;
- actions de l'air sur le robot et résistance au roulement négligées ;
- dimensions : a= 0,180 m; b= 0,336 m et h= 0,3 m.
Actions mécaniques extérieures appliquées sur le robot :
- \(\overrightarrow {A_{S\rightarrow R}}\) , action de contact du sol sur le robot appliqué au point A ;
- \(\overrightarrow {B_{S\rightarrow R}}\) , action de contact du sol sur le robot appliqué au point B ;
- \(\overrightarrow {P}\), action à distance de la pesanteur sur le robot appliqué au centre de gravité G.
Q3 : En appliquant le P.F.D au robot au point A, montrer que :
𝑿𝑨+𝑿𝑩−𝑷·𝒔𝒊𝒏(𝝑)=𝑴𝒓·𝒂𝑮 (Equation 1)
𝒁𝑨+𝒁𝑩−𝑷·𝒄𝒐𝒔(𝝑)=𝟎 (Equation 2)
𝒁𝑩·𝒃−𝑷·𝒂·𝒄𝒐𝒔(𝝑)−𝑷·𝒉·𝒔𝒊𝒏(𝝑)−𝒂𝑮·𝑴𝒓·𝒉=𝟎 (Equation 3)
Q4 : Calculer ZB puis ZA.
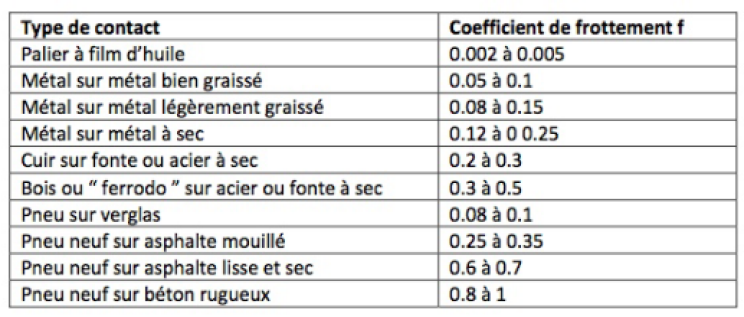
Q5 : En écrivant les équations à la limite du glissement à chaque roue, déterminer le coefficient d'adhérence minimum f à respecter pour ne pas patiner au démarrage.
Conclusion sur la motricité
Q6 : Proposer et justifier un choix de matériaux pour les roues du robot.