2 Étude du basculement :
Hypothèses :
- le repère est supposé galiléen ;
- le mécanisme admet un plan de symétrie parallèle à \((\vec {x},\vec {y})\) ;
- le système isolé S est un demi-fauteuil avec son demi-passager ;
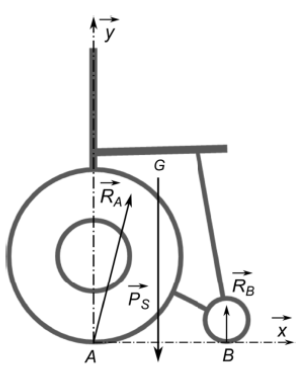
- G est le centre de gravité du système S ou s'applique le poids \(\overrightarrow {P_{S}}\)
- le fauteuil est animé d'un mouvement de translation uniformément accéléré \(\overrightarrow {A_{G /sol}}= a \vec{x}\) ;
- en A, la modélisation de l'action de contact tient compte du frottement puisque la roue est motrice soit \(\overrightarrow {A_{sol\rightarrow S}}= A_x \vec x + A_Y \vec y\)
- en B, le contact est supposé sans frottement ;
- le frottement de l'air et la résistance au roulement sont négligés.
Application du P.F.D
Données :
- la masse du système : ms = 65 kg ;
- \(\overrightarrow {AG}= x_G \vec x +y_G \vec y\) avec xG =194 mm et yG = 643 mm ;
- empattement du chariot AB = 336 mm ;
- rayon de la roue R = 320 mm
Q1 : Montrer que l'application du P.F.D appliqué à S au point G donne les 3 équations suivantes :
Ax = ms a
Ay – ms.g + By = 0
yG.Ax – xG.Ay + (AB – xG). By = 0
Q2 : Donner la valeur de By si le fauteuil est à la limite du basculement . En déduire les valeurs de Ax et Ay correspondantes.