Introduction
L'haptique (qui signifie « je touche ») désigne la science du toucher, par analogie avec l'acoustique ou l'optique. Au sens strict, l'haptique englobe la perception tactile et les phénomènes kinesthésiques, c'est-à-dire la perception du corps dans l'environnement.
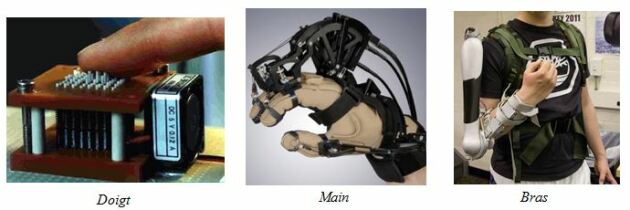
La restitution de sensations haptiques artificielles nécessite d'utiliser un dispositif, dit « à retour d'effort », générant des forces dont l'amplitude et la fréquence reproduisent les sensations réelles. La taille de ces dispositifs varie selon la partie du corps à stimuler .

Notre robot Haptique est un produit pédagogique basé sur une interface Haptique de type robot delta, à structure parallèle avec 3 chaînes cinématiques fermées identiques, reliant la base à l'organe terminal.
Il offre 3 degrés de liberté en translation.
Une boule amovible se monte sur la base du robot. Elle permet de manipuler le robot et d'avoir à disposition 4 boutons poussoir.
