Fonction CONVERTIR et TRANSMETTRE
Le déplacement du robot est assuré par deux motoréducteurs, un pour chaque roues chenillées, la vitesse de déplacement V du robot dépend essentiellement des fonctions CONVERTIR et TRANSMETTRE.
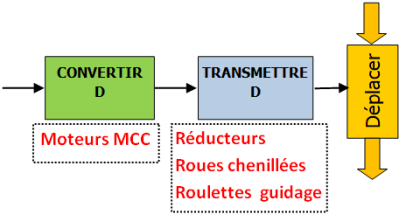
La fonction TRANSMETTRE se décompose en fonctions secondaires réalisées par des solutions constructives élémentaires.

Remarque : Chaque motoréducteur est constitué d'un moteur et d'un réducteur Roue et Vis , ce qui correspond à deux fonctions différentes au sein d'un même composant.